Erläuterungen zum "Wiring" des PiMowBot"-Projektes von Dirk Weyand/TGD Consulting:
Die folgenden Infos beziehen sich auf den
Workshop Teil 1.
Abbildung 5
Erläuterung der Abbildung 5 zum "Wiring" des GPS-Moduls:

| GPSV3-NEO |
RPI |
| VCC |
3,3 V - [1] |
|
| RX |
- |
| TX |
GPIO 15 [10] |
| GND |
GND [6] |
Abbildung 6
Abbildung 6 zeigt BME- (links) und Kompass-Modul (rechts)
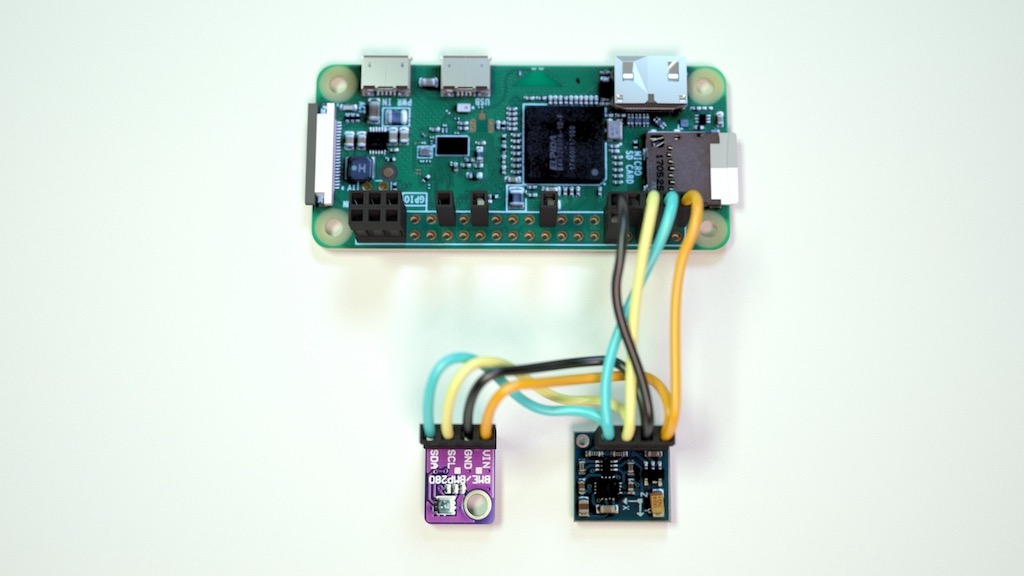
Pin-Zuordnung folgt
Abbildung 7
Hier ist der Anschluss der Sensoren zur Distanzerkennung (in der neuen Version - ohne Multiplexer) ersichtlich."
Der Anschluss der VL53L0X Time-of-Flight Sensoren an den RPi Zero/RPI4

Ohne die Pi Hat V1_1 von Ulli hieß es:
2 Leitungen von GPIO22 und GPIO27 an die XShut Pins der Sensoren verlöten.
GPIO22 geht an den rechten ToF Sensor
der GPIO27 geht an den XShut Pin des linken Sensors.
| |
ToF 1 = linker Sensor
ToF 1 --> RPi Zero
VIN --> 3V3 [17]
GND --> GND [14]
SCL --> SCL [5]
SOA --> SDA [3]
GPIOI - ungenutzt
XSHUT -->GPIO27 [16] |
|
ToF2 = rechter Sensor
ToF 2 --> RPi Zero
VIN --> 3V3 [1]
GND --> GND [6]
SCL --> SCL [5]
SDA --> SDA [3]
GPIOI - ungenutzt
XSHUT -->GPIO22 [15] |
2. sudo raspi-config aufrufen und in ADVANCED Interface Options --> i2c "automatic enablen beim Booten ! (normales Interface i2c enablen reicht nicht...)
3. comand prompt: >in das RAM wechseln /dev/shm
mit > ls -lart alle Dateien anzeigen...
mit >tail -f .PiMowBot_right.distance bzw. _left.distance
kann man die TOF testen.... Hand vor halten... und die Distanz-Werte sollen sich ändern...
pi@pimowbot:/dev/shm $ tail -f .PiMowBot_left.distance
101tail: .PiMowBot_left.distance: file truncated
102tail: .PiMowBot_left.distance: file truncated
101tail: .PiMowBot_left.distance: file truncated
819tail: .PiMowBot_left.distance: file truncated
19tail: .PiMowBot_left.distance: file truncated
20tail: .PiMowBot_left.distance: file truncated
16tail: .PiMowBot_left.distance: file truncated
14tail: .PiMowBot_left.distance: file truncated
11tail: .PiMowBot_left.distance: file truncated
11tail: .PiMowBot_left.distance: file truncated
11tail: .PiMowBot_left.distance: file truncated
Kontrolle der i2c Sensoren:
Command prompt:
pi@pimowbot:~/pimowbot $ i2cdetect -y 1
 Abbildung 8
Abbildung 8
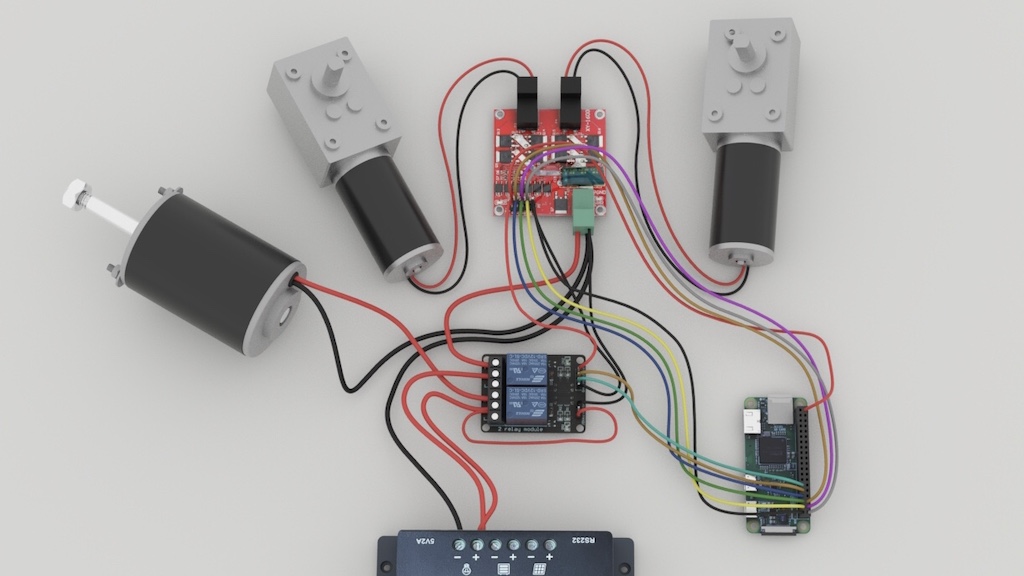 Tipp:
Tipp: Da das Relais-Modul ebenfalls mit 12V betrieben wird, achten Sie darauf, dass die Jumperbrücke zwischen JD-Vcc und Vcc entfernt ist
und die 12V nur direkt an JD-VCC anliegen. Ansonsten könnte der Raspberry Pi Schaden nehmen.
Hinweis: Falls der Solarladeregler beim Einschalten des Antriebes einen Überstromfehler auslöst, ist die 12V-Leitung zum Relais-Anschluss für den Antrieb/Motortreiber direkt an +12V des Akkus über eine 10A Sicherung anzuschließen.
Abbildung 9
05 PV und Akku überwachen
Die Energieversorgung des PiMowBots erfolgt über das Solarpanel und den Akku.
Diese Komponenten werden mit Hilfe eines INA3221 I²C-Strom-/Spannungs-Monitors überwacht.
Wie aus Abbildung 9 (unten) ersichtlich, erfolgt der Anschluss der INA3221 Messkanäle als High-Side Schaltung im Verbraucherkreis.
Das INA3221-Modul selbst ist mit dem I²C-Bus und 3,3V/GND des Raspberry Pi verbunden.
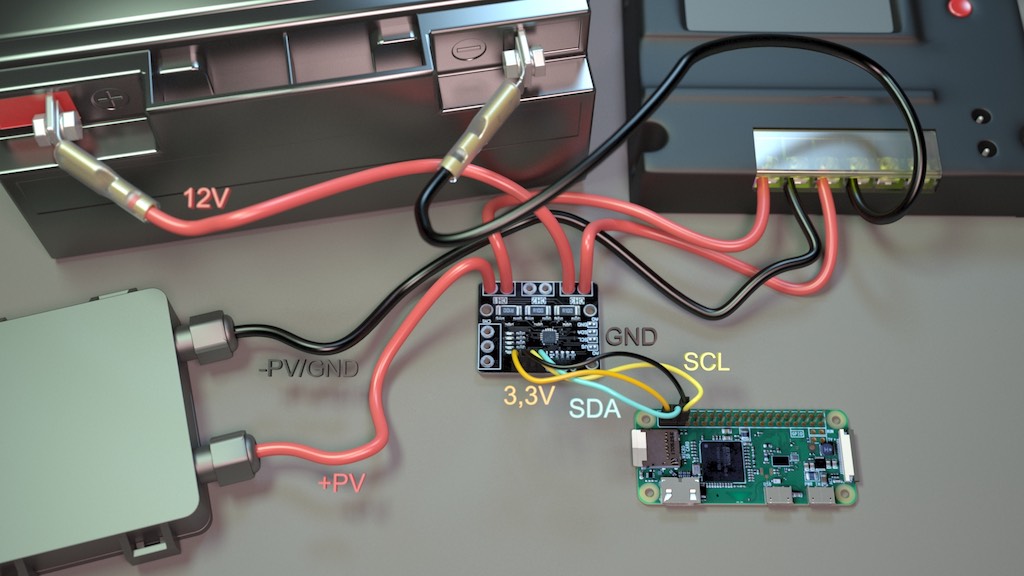
Pin-Zuordnung:
INA3221 RPi Zero
VS --> Pin 1 (3,3V)
Gnd --> Pin 6 (Gnd)
SCL --> Pin 5 (GPIO 03)
SDA --> Pin 3 (GPIO 02)
Beim INA-Modul ist auch das hier zu beachten: (Quelle:
Forum-Eintag von TGD)
Noch ein wichtiger Hinweis zum Power-Monitor mit dem INA3221-Modul.
Leider gibt es davon viele Module, die sich nicht gemäß der Herstellervorgaben des INA3221 ICs als High-Side-Schaltung im Verbraucherkreis verwenden lassen,
da sie ein nicht kompatibles, falsches Platinenlayout beim Modul aufweisen.
Deshalb habt ein besonderes Augenmerk darauf, welches INA3221-Modul man kauft.
Achtet darauf, dass die Leiterbahnen vom Anschluss der jeweiligen Messkanäle nur zum zugehörigen Shunt führen.
Bei Verwendung eines falschen, ungeeigneten Moduls können andere Komponenten des PiMowBots beschädigt werden.
Dieser Hinweis ist nun ebenso im 1.Teil des Workshops aufgeführt.
Ein korrektes Modul sieht so aus:


INA 3221 Powermonitor
Abbildung 10 (Bild folgt)
Zum
Motortreiber (Bild folgt):
Für die Steuerleitungen zum L298er Motortreiber-Modul gilt: (Quelle:
Forumeintrag TGD)
RPi-37 -> IN1
RPi-35 -> IN2
RPi-38 -> IN3
RPi-40 -> IN4
EnA und EnB sind jeweils mit +5V auf dem L298er Modul gebrückt. Die +5V Versorgungsspannung des L298er Modul wird durch den dort verbauten Step-Down-Converter aus den 12V DC erzeugt.
Alternative Sensoren (Ultraschall)
Ultraschall-Sensor
mehr dazu später... - wenn er integrierbar ist. (20.4.24)